搜索
关闭

机器人与自主系统实验室团队研发新型自主化智能授粉机器人成果在顶级农业期刊发表
 时间:2024-04-03
时间:2024-04-03
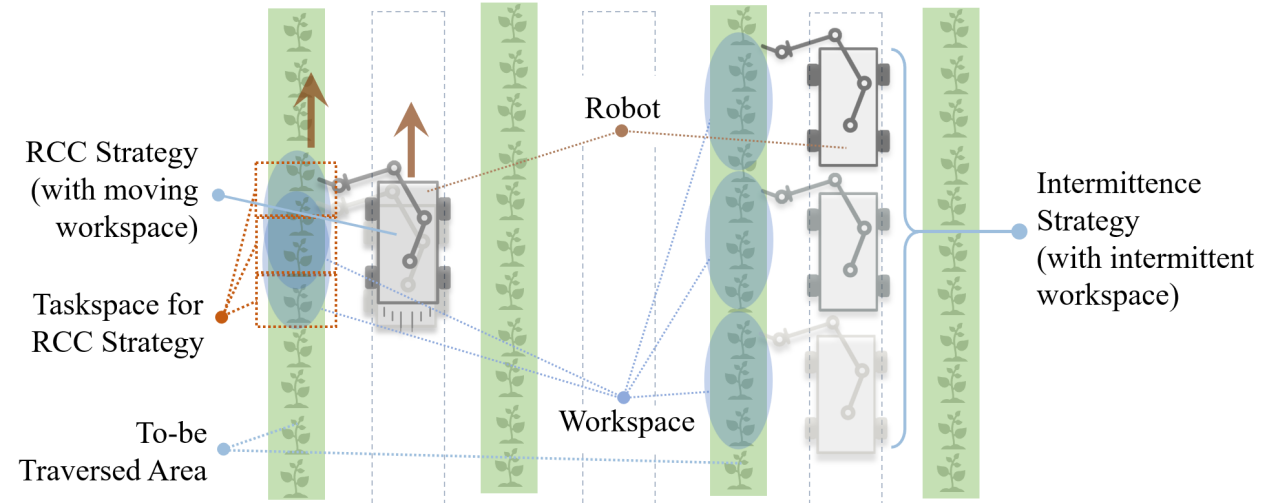
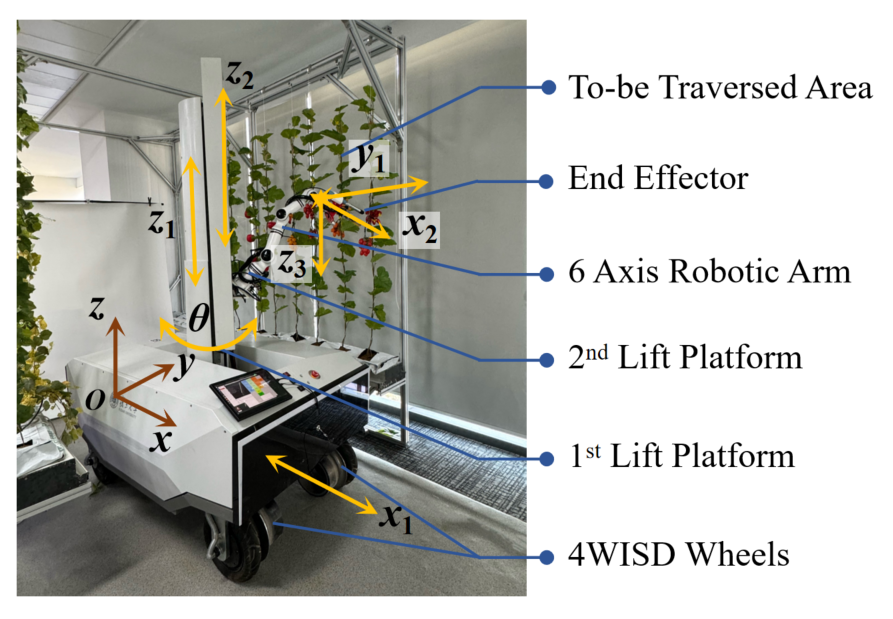
近日,复旦大学信息科学与工程学院电子工程系机器人与自主无人系统实验室团队提出了一种移动机器人多任务点遍历的冗余协同控制算法。该方法利用了移动臂式机器人的可用冗余,实现了动态旅行商问题(DTSP)的分区块求解,显著提高了移动机器人多任务处理的效率。2024年3月28日,相关研究成果以《机器人授粉的新型冗余合作控制策略》(A Novel Redundant Cooperative Control Strategy for Robotic Pollination)为题,发表在《农业中的计算机和电子设备》(Computers And Electronics In Agriculture)。
复旦大学信息科学与工程学院电子工程系在读博士魏佳炜为该研究第一作者,复旦大学信息科学与工程学院电子工程系陈雄研究员与商慧亮副教授为论文的共同通讯作者。该项工作得到了上海市科技兴农项目的支持。